Сложносоставное слово «радиолокация» возникло при объединении латинских терминов «radiare» (излучение) и «locatio» (расположение). Соответственно, радиолокация (РЛ) – это определение месторасположения объекта.
В современном мире понятие РЛ обозначает комплекс технической радио аппаратуры и способы ее применения для вычисления координат и характеристик движения объектов с использованием радио волн.
Благодаря РЛ работают навигационные системы, производится обнаружение и управление воздушными, водными, наземными объектами, обеспечивается безопасность движения, получаются необходимые данные для предсказания погоды и многое другое.
Определение координат, расстояния до искомого объекта может производиться по-разному.
Разберем позиционные методы НЦ. Подробно рассмотрим дальномерный(ДМ), угломерный(УМ), разностно-дальномерный ( РДМ) и угломерно-дальномерный (УМДМ) алгоритмы.
Позиционные методы определения местоположения
Это стандартные способы НЦ. Они основаны на установлении линий или ПП на Земле или в околоземном пространстве.
Поверхность положения (ПП) – это набор пространственных точек, имеющих одинаковые значения измеряемого навигационного параметра. Например, для характеристики дальности форма ПП – сфера с центром – в месте нахождения радиостанции.
Область пересечения 2 ПП определяет линию положения (ЛП), являющуюся комплексом точек на ПП, имеющих также одинаковую величину конкретного параметра навигации.
Системы координат
В средствах РЛ разведки используют как криволинейные, например сферические, так и прямоугольные координаты. Криволинейные координаты точки представляют собой упорядоченную тройку чисел, однозначно определяющих ее положение в пространстве. В сферической системе координат эту тройку образуют Д а, е. Из прямоугольных систем координат находят применение нормальная земная и нормальная системы. Обе системы правые.При РЛ определении местоположения наиболее часто применяют местную сферическую систему координат, начало которой находится в точке размещения антенны. В наземной РЛС (РНС) одна из осей координатной системы обычно совпадает с северным направлением меридиана, проходящего через позицию антенны РЛС, а местоположение цели Ц находится по результатам измерения наклонной дальности Д азимута а и угла места е (рис. 9.7, а). При этом система координат неподвижна относительно земной поверхности. Если РЛС располагается, например, на движущемся объекте, то ось X координатной системы совмещается с продольной осью объекта, а ось Y – перпендикулярна ей и лежит в плоскости погона объекта (рис. 9.7, б), образуя с осью Н, направленной по нормали вверх, правую систему. В этом случае для определения местоположения цели измеряются наклонная дальность Д, курсовой угол цели а и угол места е. Такая система связи координат перемещается относительно земной поверхности со скоростью, равной скорости движения объекта, и поворачивается вокруг Земли при его эволюциях.

Рис. 9.7. Местные сферические системы координат
Начало нормальной земной системы координат фиксировано по отношению к Земле. Обычно за начало этой системы принимают точку стояния средства или одной из его составных частей. Ось абсцисс, как правило, направлена на север, положение ее определяется в ходе ориентирования средства разведки. Оси нормальной системы координат перемещаются вместе с объектом и в любой момент времени остаются параллельными осям земной системы координат. Переход от сферической системы координат осуществляется по известным зависимостям

При определении местоположения с помощью РНС применяют как местную сферическую систему координат (рис. 9.7, а), так и глобальные системы. Местные системы координат используют при дальностях Д не превышающих нескольких сотен километров (в зоне прямой видимости), а глобальные – в РНС большой дальности.
Глобальные системы координат жестко связаны с Землей и применяются для навигации, охватывающей всю земную поверхность или значительную ее часть. Наиболее распространенными глобальными системами координат являются: географическая (или геодезическая), геоцентрическая, а также левая и правая ортодромические системы координат.
В системе координат в качестве основы используется земной геоид и за основную плоскость отсчета принята плоскость экватора. Под поверхностью геоида понимается поверхность потенциала силы тяжести, совпадающая с поверхностью мирового океана в спокойном состоянии. В каждой точке поверхность геоида нормальна к направлению силы тяжести. Положение точек на поверхности геоида определяется астрономическими широтой и долготой. Поверхность геоида, используемая для астрономических измерений, непригодна для решения задач навигации, так как применительно к поверхности геоида не существует аналитических зависимостей для вычисления расстояния между двумя точками.
Поэтому в качестве дальнейшего упрощения действительной формы Земли принимают эллипсоид вращения. Для наилучшего приближения эллипсоида к действительной фигуре Земли в нашей стране принят эллипсоид. Большая и малая полуоси эллипсоида (см. рис. 9.8) соответственно равны: а = 6378245 м и Ъ = 6356863 м.

Рис. 9.8. Географическая (а) и геоцентрическая (б) системы координат
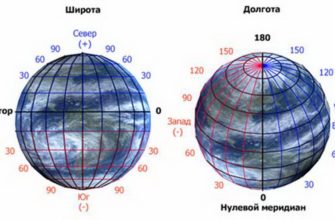
Положение точек на поверхности эллипсоида вращения определяется геофизическими координатами – геодезическими широтой В и долготой L (рис. 9.8). Геодезической широтой точки О называется угол между нормалью к поверхности эллипсоида в этой точке, которая на рис. 9.8,а показана штриховой линией, и плоскостью экватора. Широта отсчитывается от плоскости экватора к полюсам PN и Р$ от 0 до ± 90°. Знак плюс ставят при отсчете к Северу, а минус – к Югу.
Геодезической долготой называют двугранный угол, заключенный между плоскостями начального меридиана и меридиана данной точки. Долгота измеряется либо центральным углом в плоскости экватора, либо дугой экватора в пределах от 0 до 360°. Долгота, отсчитываемая в восточном направлении, имеет знак плюс, в западном направлении – знак минус. На аэронавигационные и топографические карты наносятся меридианы и параллели геодезической системы координат, поэтому положение различных точек на земной поверхности (целей, промежуточных пунктов маршрута, мест расположения радионавигационных средств и т.п.) принято определять геодезическими координатами.
Поверхность эллипсоида вращения имеет строгое математическое описание и позволяет вывести формулы, необходимые для решения задач навигации. Однако основные аналитические зависимости при этом оказываются сложными и практически могут быть реализованы только с использованием бортовых цифровых вычислительных машин (ЦВМ). Все это в ряде случаев вынуждает прибегать к дальнейшему упрощению модели поверхности Земли. Таким упрощением является замена поверхности эллипсоида вращения поверхностью сферы.
При использовании геоцентрической (сферической) системы координат Земля принимается за шар, радиус которого равен R = 6371110 м. Геоцентрическая система координат отличается от геодезической способом отсчета широты. Отсчет геоцентрической широты ср производится между плоскостью экватора и направлением радиус-вектора (рис. 9.8,6). Способ отсчета геоцентрической долготы X совпадает со способом отсчета географической долготы. Формулы для решения задач навигации на сфере хотя и проще, чем на поверхности эллипсоида, но все же требуют применения достаточно объемных программ при использовании ЦВМ или применения аналоговой вычислительной техники, так как в формулы входят не непосредственно сферические координаты А и (р, а их тригонометрические функции.
Для решения задач навигации в сравнительно узкой полосе относительно экватора формулы могут быть значительно упрощены за счет замены тригонометрических функций их аргументами. Например, при допустимых относительных погрешностях не более 0,2… 1% в полосе земной поверхности ± (400…900) км от экватора в ряде случаев можно применять следующие упрощения: sin#>= (р, cosp= 1. Желание решать навигационные задачи по упрощенным алгоритмам в районах Земли, удаленных от экватора, привело к широкому использованию произвольных сферических координат, называемых ортодромическими.
Рис. 9.13. Определение местоположения в дальномерно- пеленгационной РНС
Разностнодально-дальномерные РНС включают группы РНТ с синхронизацией моментов излучения сигналов. Для ее обеспечения одна из РНТ группы считается ведущей, остальные ведомыми. Каждая из ведомых РНТ излучает сигнал по истечении установленного для него промежутка времени после приема сигнала ведущей РНТ. Известные взаимные сдвиги моментов излучения легко исключаются при приеме кодированных сигналов РНТ на объектах навигации. Поэтому после приема излучений любой пары РНТ М„ М,- можно принять в качестве навигационного параметра разность времен распространения радиоволн от этих маяков до объекта навигации At = t. -1. = —‘?–, пропорциональную соответствующей разности с
расстояния Д – Д = ДД/. Для уточнения временного интервала At наряду с огибающими сигналов может привлекаться их фазовая структура.
Точно измеренным значениям АДу соответствуют линии положения на плоскости в виде гипербол (рис.9.14) и поверхности положения в пространстве в виде гиперболоидов вращения. Фокусами гипербол и гиперболоидов являются пункты расположения РНТ М„ М;. Точка пересечения двух гипербол или соответственно трех гиперболоидов вращения в пространстве позволяет найти позицию О (область положения) объекта. В отличие от дальномерного и угломерного методов рассматриваемый метод местоопределения называют разностно- дальномерным.
Серьезным достоинством разностно-дальномерного метода является отказ от использования запросчиков на объектах навигации, что упростило их бортовую аппаратуру. В отличие от углометрии существенно повышается точность местоопределения объектов на больших расстояниях от маяков.

Рис.9.15. Определение местоположения квазидальномерной РНС
Из-за неидеальной синхронизации реализуют фактически не дальномер- ный, а квазидалъномерный метод. При этом последовательный прием сигналов от ряда маяков создает резерв исходных данных, хотя и с известными ошибками (рис.9.16). Резерв исходных данных расходуют на повышение точности как местоопределения, так и временной синхронизации.
Квазидальномерный метод осваивался в качестве режима сверхдлинноволновых глобальных систем «Омега» с наземными маяками и составляет основу перспективных спутниковых систем «Навстар» (США) и «Глонасс» (Россия). Ошибки местоопределения доводятся до десятков и даже единиц метров. Меньшие ошибки соответствуют сложным кодированным сигналам. Это показывает, что в перспективе может отпасть надобность в специальных системах ближней навигации и навигации для разведки ископаемых.

Рис.9.16. Область местоположения объекта с учетом погрешностей измерений в квазидальномерной системе
В системах «Навстар» и «Глонасс» проводятся и фазовые измерения, учитывающие малые разности частот, характеризующие производные дальностей. В этом смысле иногда говорят о квазидальномерном квазидоплеров- ском методе работы этих систем.
Метод счисления пути
К методам непозиционной навигации относят: 1) метод счисления пути; 2) обзорно-сравнительные (корреляционно-экстремальные) методы навигации.
Метод счисления пути основан на измерении вектора скорости объекта относительно поверхности Земли и интегрировании этого вектора по времени. Текущую позицию объекта навигации устанавливают косвенно по его начальной позиции и результату двукратного интегрирования вектора ускорения или однократного интегрирования вектора скорости. Для этого необходимо: 1) измерять указанные векторы или один из них с помощью акселерометров или доплеровского измерителя скорости; 2) сохранять информацию о начальной ориентации объекта. Ее получают: а) непосредственно от позиционных гироскопов — датчиков угловых отклонений; б) в результате интегрирования угловых скоростей, выдаваемых скоростными (дифференцирующими) гироскопами — датчиками угловых скоростей.
Измерение этих приращений осуществляется на объекте в так называемой измерительной системе координат Хи02Ги, положение которой задается перед началом движения и сохраняется неизменным в течение всего времени перемещения объекта. Неизменность положения ее осей в процессе движения обеспечивается с помощью гироскопических устройств, обладающих после их разарретирования свойством сохранения заданного направления. Принцип работы данной аппаратуры, реализующий метод счисления пути, основывается на непрерывном измерении при движении объекта приращений навигационных координат АХи, ДГ„ относительно известных координат точки начала движения 2Гн0, Гно (рис. 9.17).
Поэтому для получения текущих навигационных координат движущегося объекта необходимо обеспечить преобразование приращений АХИ, АГИ, полученных в измерительной системе координат, в приращения АХи, АГ„ в навигационной системе координат. С этой целью в начальной точке О г производится ориентирование объекта, заключающееся в определении взаимного разворота осей измерительной и навигационной систем координат (определение дирекционного угла продольной оси объекта а).
Значение угла а вводится перед началом движения в навигационную аппаратуру и учитывается при преобразовании измеряемых на объекте приращений координат в навигационную систему координат:


Рис. 9.17. Принцип определения координат
При а = 0, что соответствует параллельному расположению осей измерительной и навигационной систем координат, АХИ = АХН, а Д7И = Д7Н– В радиотехнических системах навигации измерение приращений координат при движении объекта основано на измерении величины и направления вектора скорости объекта в измерительной системе координат. Знание этих величин позволяет определить направление движения объекта, а также проходимый им путь и произвести с учетом этого его раскладку на соответствующие оси измерительной системы координат. Для наземных объектов вектор скорости совпадает с продольной осью объекта. При движении объекта по плоскости изменение направления вектора скорости будет происходить только в горизонтальной плоскости и определяется углом курса у/ (см. рис. 9.17). В этом случае величина скорости, определяющая приращение координат, будет соответствовать модулю вектора скорости, а конечное приращение пути AS за время At в направлении движения объекта будет равно AS = VAt. Тогда приращение координат в измерительной системе на данный момент времени может быть найдено путем раскладки пройденного пути AS на координатные оси ОгХи и 02У„ с учетом угла курса объекта у/ (при а = 0):

При непрерывном измерении направления движения объекта у/ и проходимого им пути (AS —» dS) текущие навигационные координаты объекта будут определяться следующими выражениями:

t
где S = | Vdt – путь, пройденный объектом от начальной точки.
о
Данные выражения справедливы при движении объекта по плоскости. Однако в реальных условиях при движении объекта по пересеченной местности с подъемами и уклонами направление вектора скорости будет определяться двумя углами: в горизонтальной плоскости – углом курса у/и в вертикальной плоскости – углом тангажа 3. Приращение же координат определяется только горизонтальной составляющей скорости, которая в данном случае равна
![]()
С учетом (9.5) и (9.6) зависимости (9.4), могут быть преобразованы к ви- ДУ

а с учетом произвольного разворота навигационной и измерительной систем координат

В колесных и гусеничных механических топопривязчиках съем информации о пройденном пути производится непосредственно с ходовой части. Этому способу присущи достаточно большие методические погрешности измерения текущих координат, обусловленные в основном пробуксовкой колеса-датчика, зависящей от типа грунта и его состояния, износом шин, снижением давления в них и рядом других факторов.
В радиотехнических навигационных системах определение пройденного пути осуществляется без непосредственного контакта с грунтом на основе использования доплеровских измерителей скорости и пройденного пути, что и определяет название такой системы – доплеровская навигационная система.
Ошибки инерциальной навигации возрастают с течением времени в отсутствии корректировок. Считают, что при использовании механических гироскопов и акселерометров круговые ошибки определения местоположения и измерения скорости за 1 час навигации могут составлять 0,5…2 км и 0,5… 1 м/с соответственно. Для фиксированных дальностей навигации ошибка ме- стоопределения ракеты меньше, чем для самолета, имеющего меньшую скорость движения. При небольших скоростях и больших дальностях данные средств инерциальной навигации приходится корректировать, используя для этого методы позиционной радионавигации или обзорно-сравнительные методы непозиционной навигации.
Обзорно-сравнительный метод определения местоположения
Обзорно-сравнительный метод основан на определении каких-либо характеристик местности, над которой летит летательный аппарат (ЛА), и сравнении их с соответствующими характеристиками, заложенными в память системы. В системах, реализующих данный метод, используется корреляционная связь между этими характеристиками, а для нахождения отклонений от заданной траектории полета -корреляционные устройства различных типов. Такие системы называют корреляционно-экстремальными, поскольку экстремум (максимум или минимум) корреляционной функции измеренных и заложенных в память системы характеристик достигается при точном соответствии траектории полета заданной.
Обзорно-сравнительны РНС обеспечивают уточнение текущего положения объекта путем сопоставления результатов обзора местности, акватории или небосвода, магнитного или барометрического поля и рельефа Земли с хранящимися в памяти характеристиками. Так, периодические радиолокационные измерения высоты полета и обзор местности позволяют корректировать траекторию полета беспилотных и пилотируемых летательных аппаратов с инерциальными системами навигации независимо от метеоусловий. Наряду с радиолокационными могут использоваться оптиколокационные датчики, в том числе датчики инфракрасного диапазона волн. Чем точнее работают гироскопы и акселерометры, тем меньший объем обзорно-сравнительной информации требуется для вождения объекта по заданной траектории.
Примером реализации обзорно-сравнительного метода может служить система, использующая информацию о рельефе местности h(x,y) (рис. 9.18) [8]. В блок памяти (БП) перед полетом вводится информация h3(x,y) о распределении высот местности в некоторой полосе вдоль маршрута полета. Текущая высота полета Нр определяется радиовысотомером (РВ) и сравнивается с барометрической высотой Н&. Вычислительные устройства (ВУ) определяют корреляционную функцию измеренного поля высот hH(x, у) и h3(x, у) и вырабатывают сигналы Av и Az коррекции полета для системы автоматического управления (САУ).

Рис. 9.18. Геометрические элементы (а), используемые в обзорно-сравнительной системе, и структурная схема системы (б): БВ – барометрический высотомер; ДИС – доплеровский измеритель скорости
Дальномерный
ДМ основан на определении расстояния между радиолокационной станцией (РЛС), излучающей сигнал, и объектом, принимающим его. Значение вычисляется по времени прохождения импульса.
ПП для ДМА имеет форму сферы, а ЛП – окружности на плоскости земли.
Для определения координат ДМС сигнал подается от 2 РЛС. Соответственно будет 2 поверх-ти и 2 ЛП в виде пересекающихся кругов.
В точке, где фигуры пересекаются и находится искомый объект.
Но ДММ определения координат не может точно указать ПЦ, так как круги пересекаются в 2-х точках, поэтому для определения места локации применяют допспособы навигации.
Разностно-дальномерный
Для этого требуется установка трех или четырех РЛС. 4 об. группируются в пары, в которых один из 2-х ИР является ведущим, а второй зависимым. Когда в схеме три РЛС, то одна – основная, а 2, расположенные под углом (меньше 180 градусов) – подчиненные.

С помощью сигналов от главной и второстепенной станций получают ЛП. Она имеет гиперболическую форму. Аналогичную выдает вторая пара ИР.
Месторасположения иск.объекта находится в точке, где пересекаются 2 гиперболы.
Этот устанавливает координаты с высокой точностью. Также РДМ определения координат позволяет следить за неограниченным количеством целей.
Угломерный
Этот применяется в 2-х видах:
- радиомаячном;
- радиопеленгаторном.
В первом случае используется ненаправленная антенна на РЛС и направленная на маяке.
Определяют линию, от которой будут отсчитывать угол (пеленг). Как правило, это вектор, идущий с юга на север, или меридиан.
Радиомаяк отправляет сигнал, РЛС принимает и вычисляет его направление, после чего определяет угол между прямой «ИР – цель» и меридианом. Полученное значение называют азимутом или истинным пеленгом.
При радиопеленгаторном способе маяк оснащен ненаправленной антенной, а РЛС – направленной.
Но с помощью одного приемника невозможно определить координаты локации, поэтому в УМ схеме используются 2 радиомаяка.
Тогда будут получены 2 пеленга и обозначены 2 ЛП, в точке, которой они пересекаются и расположена цель.
Описанный РПС работает только в случае, если объект и радионавигационные системы находятся на одной плоскости, например, на ПЗ. Когда требуется определить местоположение цели в пространстве, например, спутника СРНС (спутниковая радионавигационная система), то необходимо и третий маяк.
На заметку. Точность установления координат УГМС ниже, чем у ДМ и разностно-дальномерного метода определения координат.
УМ-дальномерный
В ближней навигации применяется комбинированный способ вычисления координат. Для него требуется только одна РЛС, умеющая устанавливать дальность, азимут и угол положения, определяемые между ПЗ и прямой, соединяющей ИР и объект.
Оборудование для станции, используемое при этом методе определения местоположения, должно включать в себя радиопеленгатор и радиодальномер.
Первый устанавливает направление расположения – азимут и угол места, а второй показывает расстояние до него.
Пересечение ПП радиодальномера (сфера) и ЛП пеленгатора (прямая) показывает точку, в которой расположена цель.
Сравнение
Для применения дальномерного и УМДМС установления координат требуется знать структуру сигнала, поэтому они чаще используются для нахождения местоположения абонентов сотовых операторов.
Разностно-дальномерный метод определения координат источника радиоизлучения, как и УМ, не требует данных о структуре сигнала, для применения их достаточно установить спектральную область радиосигнала.
Но есть и отличия.
| Параметры | Разностно-дальномерный | Угломерный |
| Антенны | Несложная конструкция.
Возможно изготавливать в миниатюрных размерах. Низкая стоимость производства. |
На данный момент нет простых схем.
Высокая цена изготовления. |
| Калибровка | Практически не нужна | Отдельные решетки требуют периодической калибровки для снижения погрешности показаний |
| Сигналы | Эффективен при работе с широкополосными сигналами малой длительности | Не зависит от ширины полосы |
| Шумы, помехи | Сла́бо чувствителен, подавляет шумы и помехи на совпадающей частоте | Возможна установка дополнительных блоков, понижающих уровень шума, но это значительно увеличивает стоимость оборудования и требует сложных вычислений |
| Зависимость точности получаемой информации от расположения | Наименьшая погрешность при размещении индикатора радиоимпульса в центре периметра, определяемого местами замеров | Зависит от расстояния между ИС и каждым маяком |
| Хранение и обработка данных | Информация собирается со всех приемников, координируется по временны́м параметрам, передается на центральный сервер, позволяя производить анализ в автономном режиме | На центральный сервер отправляются результаты и точность пеленгации.
Для сбора и хранения нетиповых параметров (спектральный анализ, перекрестная корреляция) не хватает скорости передачи информации по соединительным линиям |
Для определения координат в радиолокации применяются позицметоды.
Основой расчета служат поверхности и ЛП.
Выбор способа для поиска цели определяется количеством приемопередающих устройств.